Application Scenarios
- Human-Robot Coexistence
-
The task of the human-robot coexistence is case is to verify whether a robotic manipulator never causes a collision with a human. A typical goal of the robot would be to pick up an object and transport it to another location. The setup basically consists of a robot and an area in which humans are tracked via a camera system. The robot is a modular robot arm with at least 6 controllable degrees of freedom and an industrial gripper and the human is tracked by a 6-camera motion capture system.

- Synthesizing and verifying motion planning of autonomous vehicles
-
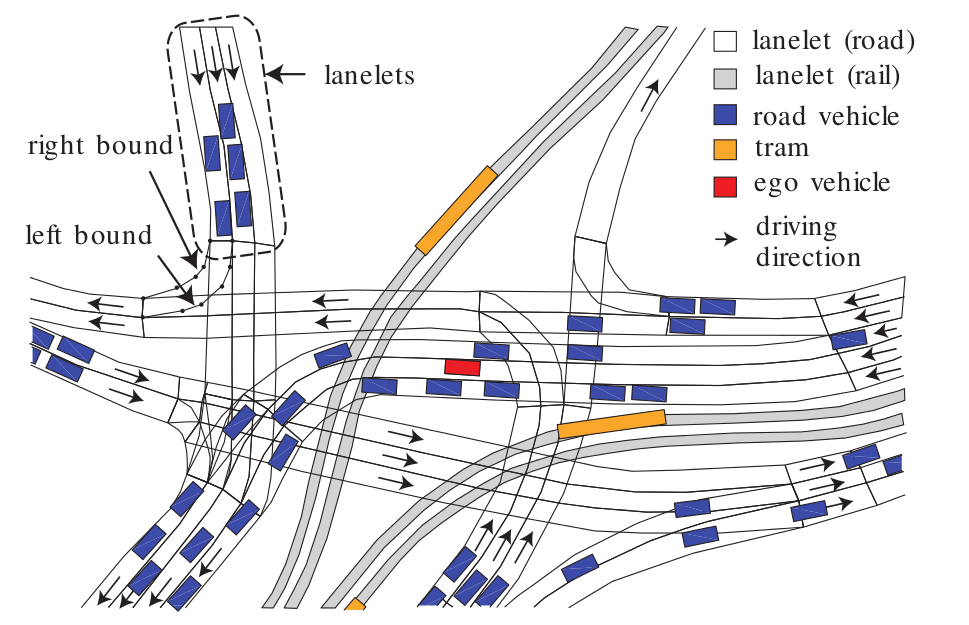
In this use case we synthesizing and verify motions of autonomous vehicles. The problem instances are provided and described in an open format through the website commonroad.in.tum.de. Solutions have to meet traffic rules specified in temporal logic. Researchers can be upload solutions to the CommonRoad website, which are ranked according to given optimization criteria.
- Robotic Urban-Like Environment
- We plan to establish and maintain a robotic urban-like multi-vehicle environment with roads, traffic lights, and multiple robotic cars equipped with processing, sensing, and communication capabilities. We aim at applying automated synthesis techniques proposed in this project. The goal is to simultaneously deploy multiple cars from rich high-level specifications expressed in linear temporal logic formulae on regions of interest in this environment while respecting the traffic rules in an autonomous fashion.